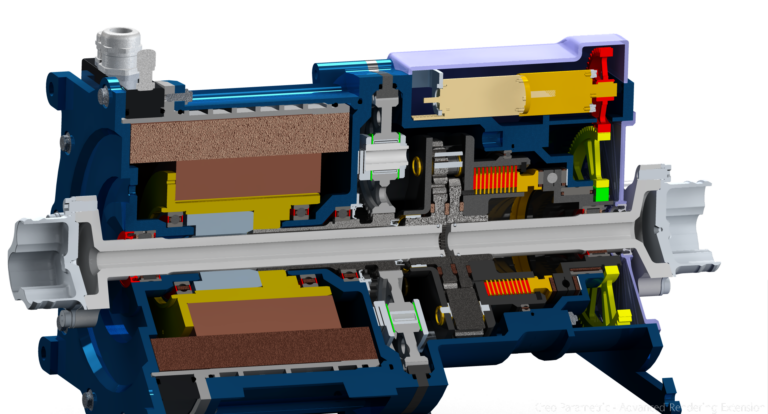
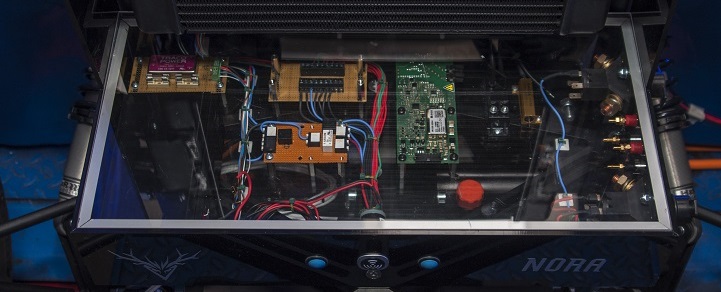
NoRa1 Technische Highlights die erste Generation Gewicht 450 kg Kapazität 6,8 kWh Leistung 80 kW Antrieb Permanenterregter Hybrid-SynchronmotorZweistufiges Stirnradgetriebe (i = 6,8)Koaxialer Aufbau der kompletten AntriebseinheitDrehmomentfühlendes SperrdifferenzialRegelung über 4-Quadranten-UmrichterSerielle Wasserkühlung von Umrichter und Motor Fahrwerk Simulierte kinematische Auslegung mit IPG CarmakerDoppelquerlenker mit Pull Rod-FederMonotube-Rennsportdämpfer mit einstellbarer ZugstufeHydraulische 2-Kreis- und 4-Kolben-Scheibenbremsanlage13 Zoll Leichtmetall-Rennsportfelgen Power Supply Unit (High Voltage) 2 Akkucontainer mit je 756 Lithium-Mangan-RundzellenEinzelzellspannungs- und TemperaturüberwachungDirekt implementiertes CAN-BUS-SystemNennspannung: 400VEnergieinhalt: ca. 6,8 kWh Steuerung (Low Voltage) Selbstentwickelter CAN-BUS mit 8 TeilnehmernFahrzeugdiagnose- und Datalogging über USB-InterfaceKontinuierliche IsolationsüberwachungModularisierter Aufbau mit Gleichteilestrategie Erfolge Qualifikation und Teilnahme an einem Event Formula Student Italy